
 Katedra folyóirat
Katedra folyóirat2024. november–december, XXXII. évfolyam, 3–4. szám, ISSN 2729-9066
A cikk letöltése PDF formátumban
Kéri Márk – Miklósi Ádám – Korcsok Beáta
Két tudományterület határán: etorobotika a középiskolai oktatásban 1
Robotok a borzongások völgyében
A technológiai fejlődés nemcsak a tudomány klasszikus módszereit írja át, hanem mindennapi életünket is átformálja. Az infokommunikációs technológiák (pl. telefonhálózat, internet) hatásának mintájára a robotok elterjedése is drasztikus változásokat ígér. Míg az ipari robotok az automatizálás révén a gyártási technológiákat és a hozzájuk kapcsolódó munkaköröket alakították át, addig a következő évtizedekben a szociális robotok megjelenése formálhatja át többek között a szolgáltatói – pl. vendéglátás (Bowen, Morosan, 2018), területőrzés, takarítás –, gondozói – pl. idősgondozás (Abdi és mtsai., 2018) – és egészségügyi – pl. terápiás alkalmazások (Wood és mtsai., 2021) – foglalkoztatási területeket.
Szociális robotok alatt azokat a mesterséges ágenseket értjük, amelyeket azzal a céllal terveztek, hogy feladataik ellátása során képesek legyenek az emberekkel interakcióba lépni: megfelelően kommunikálni és együttműködni velük (Fong és mtsai., 2003, 145). Az emberi kontextusba való beágyazottság magyarázza azt az ember–robot interakciós kutatásokban elterjedt antropocentrikus megközelítést, miszerint a szociális robotok képességeit, viselkedését és megjelenését az embert utánzó, vagy legalábbis az embert kiindulási alapnak tekintő módon alakítják ki. Ez azonban nehézségekbe ütközik mind a gyakorlati megvalósítás, mind az elmélet síkján (Miklósi és mtsai., 2017). A jelenkori technológia szintjén – a médiában látható robotok által támasztott várakozásokkal szemben – a robotok számára túl bonyolult modell az ember, akár a fizikai (helyváltoztató mozgás, tárgymanipuláció, szenzoros érzékelés, működési idő, működés változatos környezeti feltételek mellett, stb.), akár a szoftveres képességek (navigáció, személyfelismerés, érzelemifelismerés, tanulás, kommunikáció stb.) tekintetében. Azonban ha a technológiai akadályok idővel el is hárulnak, akkor sem feltétlenül ideális az ember a robotok mintájaként (Abdai, Miklósi, Nyomtatásban, 2024).
Mashahiro Mori japán robotikus 1970-ben fogalmazta meg Uncanny valley hipotézisét, amely magyarul ,,borzongások völgye”-ként került be a köztudatba. A borzongások völgye azt a feltételezett jelenséget írja le, mely szerint a robotok emberszerűségük alapján különböző hatást váltanak ki az emberekben. Az ipari robotok gépi megjelenésétől kiindulva ha növeljük a robotok emberszerűségét, egy görbe rajzolódik ki, melynél egy pontig növekszik a robotok kedvelhetősége. Az emberi kinézet megközelítésével azonban a kedvelhetőség hirtelen lecsökken: a nagymértékben, de nem tökéletesen emberszerű robot félelmet, viszolygást vált ki, bekerül a „borzongások völgyébe” (Mori, 1970). A hipotézis szerint a völgy után van egy maximális pont, ahol a robot emberhez való hasonlósága révén az ember számára már megkülönböztethetetlen lesz a mesterséges ágens egy humán szervezethez képest. Itt az elmélet szerint maximális lehetne a robot kedvelhetősége, ám belátható, hogy ez technológiai szempontból még nagyon távoli lehetőség, másrészt komoly etikai problémákat is felvet. A robot itt az ember versenytársaként jelenhet meg, így az ,,Uncanny valley”-jelenség az ember–robot kooperáció egyik gátló tényezőjévé válhat (Miklósi és mtsai., 2017).
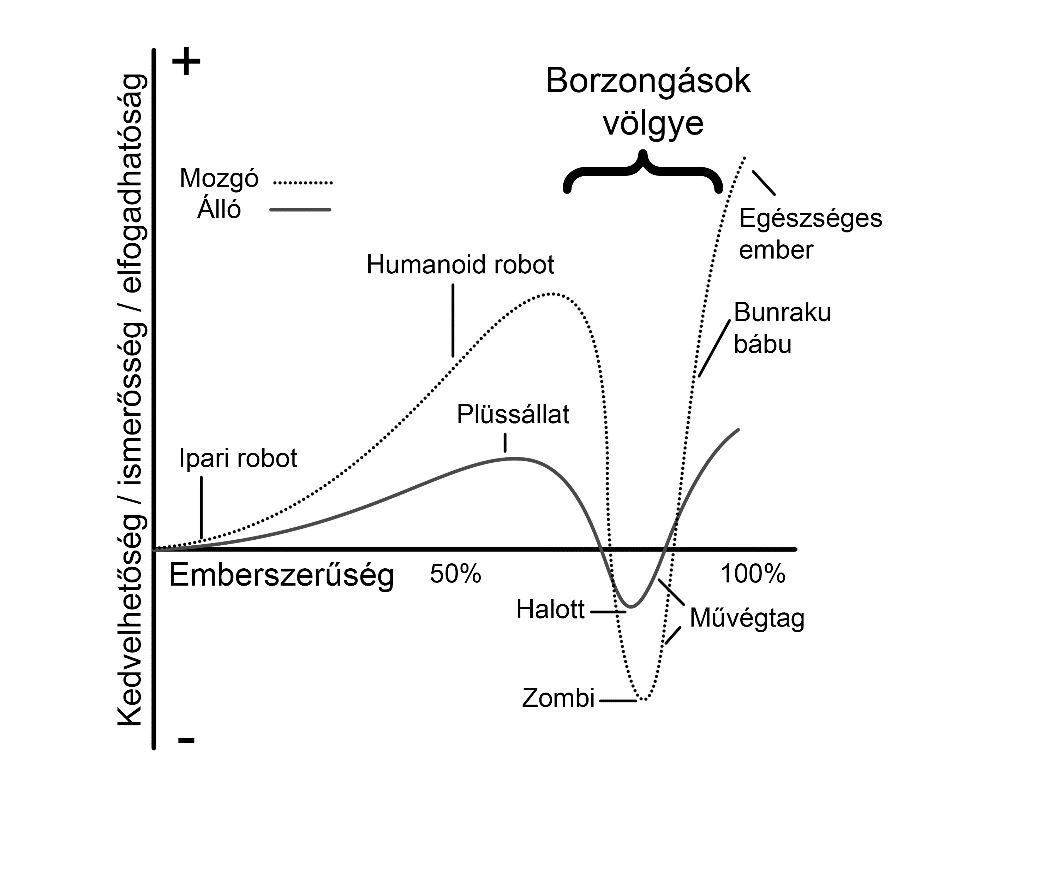
1. ábra: A borzongások völgye (Mori, 1970 alapján)
Ahol az etológia és a robotika összeolvad
Az emberközpontú megközelítés helyett egy jóval szélesebb spektrumú, evolúciós szempontok szerinti robotfejlesztés is lehetséges a biológiai aspektusok hangsúlyozása által. A robotok viselkedésének kialakításában segítséget nyújthat az etológia, a biológia azon területe, mely az állati és emberi viselkedés kutatásával, elemzésével foglalkozik. A két tudományterület ötvözéséből született új megközelítés az etorobotika (Abdai, Miklósi, 2024).
Az etorobotika a robotokat külön „fajként” kezeli, melyek fizikai és szoftveres képességei, külső megjelenése és viselkedése is a robot funkciójának, elvárt szerepkörének kell megfeleljen. Ez a szerepkör tekinthető egyfajta ökológiai niche-ként is, melyben az adott robotnak maximális teljesítményt kell nyújtania. A niche („fülke”) olyan értelmezési terület, amelyet speciálisan egy adott faj tölt be a vizsgált életközösségben (Abdai, Miklósi, 2024). Ezt a megközelítést a robotikára alkalmazva nem az antropomorf jellegek kerülnek szükségszerűen előtérbe, hanem a robot adott niche-ben betöltött szerepe. Az ember–robot interakciót fajok közötti interakcióként kezelve a robotokat csak olyan alapvető szintű szociális kompetenciával kell ellátni, amely megfelel az adott robot funkciójának. A szociális kompetencia alatt az egyed azon képességét értjük, mellyel olyan szociális készségeket tud kialakítani, amik lehetővé teszik a szociális csoport szabályainak, elvárásainak való megfelelést (Miklósi, Topál, 2013, 3–4). Az alulról felfelé építkező megközelítést követve a robotoknak nem kell az emberekével azonos vagy azt megközelítő szociális kompetenciával rendelkezniük, elég egy minimális készségkészlet, amelynek elegendő közös vonása van az emberekével. Hasonló jelenségre példát találunk az ember–állat interakciók körében a kutyánál, mely a domesztikáció során olyan képességekre tett szert, melyekkel az emberi környezetben, az emberekkel együttműködve széleskörűen tud feladatokat ellátni (gondoljunk csak a társállatként tartott kutyák mellett a pásztor-, vakvezető, terápiás vagy rendőrkutyákra). A kutyákhoz hasonlóan a robotoknak sem emberszerűnek kell lennie, hanem az adott feladatban a legjobban funkcionálni (Abdai, Miklósi, 2024). Az etorobotikai kutatásokban azokat a biológiai szabályszerűségeket, továbbá viselkedési elemeket és mintázatokat keresik, melyek robotokban való megvalósításával a robot könnyebben elfogadhatóvá, kommunikációja érthetőbbé tehető. Példaként hozhatjuk azon kutatásokat, amelyekben több állatfaj viselkedésében megfigyelhető érzelemkifejező viselkedések alapján kerestek általános szabályszerűségeket, melyek alkalmazásával mesterséges ágensek számára alakítottak ki érzelemkifejező jelzéseket: vizuális érzelemkifejezések egy absztrakt virtuális ágensnél (Korcsok és mtsai., 2018); mesterséges érzelemkifejező hangok (Korcsok és mtsai., 2020). Az etorobotok a kutyáktól olyan készségeket vehetnek át, mint például hogyan kezeljék a megoldhatatlan problémahelyzeteket (Gácsi és mtsai., 2013), vagy hogyan mutassanak kötődést (Kovács és mtsai., 2011). Ezen kutatások mindig biológiai, etológiai megfigyeléseken és kísérleteken alapulnak, melyet aztán informatikai és mérnöki munka követ, ahol a biológiai kutatási eredményeket matematikai, majd robotirányítási modellekként valósítják meg. A következő lépésében pedig a már robotban működő új viselkedést vizsgálják olyan kísérleti helyzetekben, ahol a résztvevő emberek interakcióba lépnek magával a robottal (Abdai, Miklósi, 2024).
Az új generáció találkozása a robotokkal
Pedagógusként az egyik legfontosabb kritérium, hogy a diákokat az őket körülvevő világgal a legszélesebb látószögben ismertessük meg. Ők már egy olyan évezred szülöttei, akik akarva-akaratlanul is együtt fognak élni és dolgozni mesterséges ágensekkel, robotokkal. Az elsődleges cél az iskolai praxisban a diákok megismertetése a robotikával, hogy az iskolarendszerből kilépve valamilyen mértékű tudással rendelkezzenek egy olyan kérdést illetően, ami a jövőjüket egyre dominánsabban meghatározza majd.
Az etorobotikán keresztül az olyan tanulók is közelebb kerülhetnek az etológiához és a biológiához, akik elsősorban mérnöki vagy informatikai vonalon képzelik el jövőjüket, lehetőséget kapva arra, hogy megfigyeljék azt a szemük előtt lejátszódó folyamatot, ahogy mesterséges ágensek már meglévő „ökológiai” közegekbe épülnek be. A biológiai kutatói gondolkodás, valamint a mérnöki feladatmegoldó és eredménycentrikus gondolkodási struktúrák mellett más területek is fontos szerepet kaphatnak az etorobotika oktatásba emelése során. A szociológia és pszichológia a középiskolai oktatásban csupán más tantárgyak részterületeiként vannak legtöbbször jelen, ugyanakkor ezek a diszciplínák a tanulók továbbtanulási lehetőségei között előkelő helyet foglalnak el. Ezen aspektusok beemelése az etorobotikán keresztül elősegítheti, hogy a diákok újabb szemszögből találkozzanak ezekkel a középiskolai tantervben periferikus tudományterületekkel.
A diákok olyan problémákkal találkozhatnak, amelyek az ember és a mesterséges ágens, a robot interakciójához kötődnek. Ennek első lépése mindenféle szaktárgyi anyagtól mentesen az, hogy a humán viselkedéssel, az érzelmek detektálásával, megélésével, valamint a pszichés viselkedés megértésével valamilyen módon tisztában legyenek. Az egyéni emocionális fejlődés mellett a társadalmi léptékekben való gondolkodás is hozzátartozik az etorobotikai tananyaghoz. A robotoknál olyan ágensekről beszélünk, amelyek mesterségesen megalkotva és a társadalomba integrálva valamilyen módon meg fogják változtatni annak összetételét és működését, bizonyos iparágakat, munkaterületeket alapjaiban szabva át. Ezen folyamat megértése olyan készség, amely a jövőben a diákok számára elengedhetetlenné válik.
Az etikai vonulatok sem elhanyagolhatók a téma kapcsán, például, hogy a szociális robotok alkalmazása milyen hatással járhat a szociális környezetre és társas viszonyokra, illetve ez milyen társadalmi és egyéni felelősséget von maga után. A diákok a felelősségvállalás kérdéseivel ismerkedhetnek meg a tudomány és technika fejlődése kapcsán meglátva azt, hogy a balansz megtalálása a technológiai fejlődés és a társadalom adekvát működése között mennyire fontos része a tudományos munka és a társadalmi fejlődés tervezésének.

2. ábra: Biscee, a kutatócsoport szociális robotja egy asztalhoz vezeti a vendégeket
Forrás: A szerző archívuma
A robotika és az etológia mint a középiskolai tananyag része
Az etorobotika oktatására jelenleg tanterven kívüli szaktárgyi anyagrészként van lehetőség. Az etorobotika oktatását megkönnyítené a releváns előismeretek, vagyis az etológia és a robotika megléte. A magyaroroszági Nemzeti Alaptantervhez köthető fizika és digitális kultúra című tárgyak tantervei a 9–12. évfolyam számára kevés robotikai tudásanyagot tartalmaznak. A fizika kerettanterv a 9. és 10. évfolyamon összesen 9 órát jelöl meg a ,,Gépek” tematikus blokknak szentelve, konkrét tudáselemek nélkül. Az érettségi vizsga követelményrendszerét áttekintve a robotikához kapcsolódóan semmilyen releváns tudásanyag nem jelenik meg, sem a fizika, sem a digitális kultúra tantárgy esetében. A robotika beágyazottságának növelése ezekben a tantárgyakban az oktatási rendszerbe való beavatkozásnak egy magasabb, döntéshozói szintjén kívánna szabályozást. A biológia tantárgy esetében a 9–12. évfolyam kerettantervében az etológia csak két helyen kerül deklaráltan említésre. Az ökológia témakörében kiegészítő jelleggel jelenik meg mint a környezethez való adaptálódás egy eleme. Ugyanakkor a kerettanterv tartalmaz kifejezetten az etológiai tudáselemeket közvetítő témakört is, pontosabban: „A viselkedés biológiai alapjai, a lelki egyensúly és a testi állapot összefüggése” témakört, összesen 11 javasolt óraszámmal. Ide tartoznak egyrészt azok a tudáselemek, amelyek a klasszikus értelemben vett viselkedéstan fogalmi kereteit alkotják, valamint az egészségtani- és humán vonatkozások is. Az alapvető etológiai fogalmakat az érettségi követelményrendszer nemcsak az ismeret, hanem az alkalmazás szintjén is kötelező tudáselemként várja el. 2
Az etorobotika elhelyezése a tanmenetben
Az etorobotika-oktatás egy ideális integrálási pontja a 9. évfolyamban, a biológia tantárgy keretében elképzelhető. Az etológia tárgyalására sor kerülhet az ökológiai és az állattani blokkok után. Az etológiát a kerettanterv az embertan részeként tárgyalja, főként antropocentrikus megközelítéssel. A témakör tanterv szerinti és attitűd mentén való megváltoztatása is szükséges az etorobotika megfelelő prezentálhatósága érdekében. A megjelölt témában meg kell maradniuk a humánspecifikus jellegeknek, miközben az etológiai fejezetnek tartalmazni kell a kerettanterv által megjelölt tudáselemeket. A konkrét etorobotikához kötődő tanóra az etológiai fejezet végén kaphat helyet. Ez kettős célt szolgál a pedagógiai folyamatban. Egyrészt jelentheti egy új tudományterület bemutatását, ezzel erősítve az oktatás interdiszciplináris jellegét, ugyanakkor a korábban megszerzett zoológiai-ökológiai és az etológiai ismeretek újszerű, komplex alkalmazását teszi lehetővé és várja el a diákoktól mintegy gyakorlati témafeldolgozás keretében.
Összefoglalás
Az etorobotika segítségével a tudományban egyre hangsúlyosabb interdiszciplináris megközelítések gondolatvilágát közvetíthetjük a középiskolai tanulók számára. Rámutathatunk a tudományterületek átjárhatóságára, ahogy az egymástól látszólag különálló kutatási területek progresszíven hatnak egymásra, illetve arra, ahogy a modern kutatási eredmények sokrétű szaktudás ötvözéséből, csapatmunkában születnek. A továbbtanulási lehetőségek tekintetében az etorobotika mint fiatal tudományág alkalmas annak bemutatására, hogy milyen új lehetőségek és karrierutak nyílhatnak meg a közeljövőben a diákok számára.
Felhasznált irodalom:
Abdai Judit ̶ Miklósi Ádám (Nyomtatásban, 2024): An Introduction to Ethorobotics: Robotics and the Study of Animal Behaviour. Routledge, New York pp. 584.
Abdi, Jordan ̶ Al-Hindawi, Ahmed ̶ Ng, Tiffany ̶ Vizcaychipi, Marcela P. (2018): Scoping review on the use of socially assistive robot technology in elderly care. In: BMJ Open, 8. évf., 2. sz., e018815, url: https://doi.org/10.1136/bmjopen-2017-018815 (Letöltés ideje: 2024.08.22.)
Bowen, John ̶ Morosan, Cristian (2018): Beware hospitality industry: the robots are coming. In: Worldwide Hospitality and Tourism Themes, 10. évf., 6. sz., 726–733., url: https://doi.org/10.1108/WHATT-07-2018-0045 (Letöltés ideje: 2024.09.02.)
Fong, Terrence ̶ Nourbakhsh, Illah ̶ Dautenhahn, Kerstin (2003): A survey of socially interactive robots. In: Robotics and Autonomous Systems, 42. évf. 3–4. sz., 143–166., url: https://doi.org/10.1016/S0921-8890(02)00372-X (Letöltés ideje: 2024.09.02.)
Gácsi Márta ̶ Szakadát Sára ̶ Miklósi Ádám (2013): Assistance dogs provide a useful behavioral model to enrich communicative skills of assistance robots. In: Frontiers in Psychology, 4. évf., DEC. sz., 1–11., url: https://doi.org/10.3389/fpsyg.2013.00971 (Letöltés ideje: 2024.08.22.)
Korcsok Beáta ̶ Faragó Tamás ̶ Ferdinandy Bence ̶ Miklósi Ádám ̶ Korondi Péter ̶ Gácsi Márta (2020): Artificial sounds following biological rules: A novel approach for non-verbal communication in HRI. In: Scientific Reports, 10. évf., 1. sz., 1–13., ul: https://doi.org/10.1038/s41598-020-63504-8 (Letöltés ideje: 2024.08.22.)
Korcsok Beáta ̶ Konok Veronika ̶ Persa György ̶ Faragó Tamás ̶ Niitsuma Mihoko ̶ Miklósi Ádám ̶ Korondi Péter ̶ Baranyi Péter ̶ Gácsi Márta (2018): Biologically inspired emotional expressions for artificial agents. In: Frontiers in Psychology, 9. évf., JUL. sz., 1–17., url: https://doi.org/10.3389/fpsyg.2018.01191 (Letöltés ideje: 2024.08.22.)
Kovács Szilveszter ̶ Gácsi Márta ̶ Vincze Dávid ̶ Korondi Péter ̶ Miklósi Ádám (2011): A novel, ethologically inspired HRI model implementation: Simulating dog-human attachment. In: 2nd International Conference on Cognitive Infocommunications, 1–4., url: http://eprints.sztaki.hu/6783/ (Letöltés ideje: 2024.08.21.)
Miklósi Ádám ̶ Korondi Péter ̶ Matellán Vicente ̶ Gácsi Márta (2017): Ethorobotics: A new approach to human-robot relationship. In: Frontiers in Psychology, 8. évf., JUN. sz., 1–8., url: https://doi.org/10.3389/fpsyg.2017.00958 (Letöltés ideje: 2024.08.21.)
Miklósi Ádám ̶ Topál József (2013): What does it take to become „best friends”? Evolutionary changes in canine social competence. In: Trends in Cognitive Sciences, 17. évf., 6. sz., 287–294., url: https://doi.org/10.1016/j.tics.2013.04.005 (Letöltés ideje: 2024.08.23.)
Mori Masahiro (1970): The Uncanny Valley. In: Energy, 7. évf., https://doi.org/10.1038/nn.2647
Wood, Luke J. ̶ Zaraki, Abolfazl ̶ Robins, Ben ̶ Dautenhahn, Kerstin (2021): Developing Kaspar: A Humanoid Robot for Children with Autism. In: International Journal of Social Robotics, 13. évf., 3. sz., 491–508., url: https://doi.org/10.1007/s12369-019-00563-6 (Letöltés ideje: 2024.08.22.)
2 A szerzők a magyarországi kurrikulumon belül helyezik el az erobotika oktatását. A szlovákiai közoktatásban egyelőre szintén nem szerepel ilyen jellegű szaktantárgy, csupán szakköri foglalkozásokra találunk példákat. (Szerk. megj.)